Roboter-Reinigung neu gedacht: Silberhorn & Stäubli mit Werkzeugwechsel
Teilereinigung
Silberhorn hat gemeinsam mit Stäubli eine Anlage entwickelt, die Roboter- und Durchlaufreinigung kombiniert. Das Besondere: Nicht das Bauteil wird bewegt, sondern das Reinigungswerkzeug. Möglich macht das ein Werkzeugwechsler mit Wasserübergang. So lassen sich unterschiedliche Stahl- und Aluteile flexibel, platzsparend und prozesssicher reinigen.

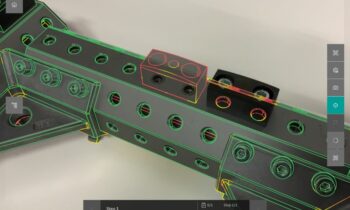
Der Roboter reinigt das an ihm vorbeifahrende Teil. Dieses Prinzip macht die Anlage hochflexibel: Es können unterschiedliche Teile gereinigt werden mit verschiedenen Werkzeugen. Bild: Stefan Woidig
Ein zerspanender Betrieb suchte Ersatz für eine Tauchanlage, die die geforderte Sauberkeit nicht mehr sicherstellen konnte. Neben der Reinigung von Stahl- und Aluminiumteilen sollte die neue Lösung eine hohe Flexibilität bei wechselnden Geometrien bieten, ohne dass aufwendige Umbauten notwendig werden. Dazu kamen enge Platzverhältnisse in der Produktionshalle sowie Teile mit einem Gewicht bis zu 10 kg und Abmessungen von bis zu 800 × 600 mm.
Das Prinzip: Werkzeug statt Werkstück greifen
Silberhorn setzte auf eine Kombination aus Durchlauf- und Roboterreinigung. Das Handling wurde dabei neu gedacht: Statt das Bauteil zu greifen und einem Werkzeug zuzuführen, greift der Roboter das Reinigungswerkzeug und bearbeitet die am Roboter vorbeigeführten Teile auf Warenträgern. Dieses Konzept spart Platz in der Zelle, reduziert Kosten für Greifer und senkt die Rüstzeiten. Für neue Teile genügt meist die Anpassung des Warenträgers.
Prozessschritte in der Anlage
Die Teile durchlaufen mehrere Stufen:
1. Vorreinigung durch Abspülen mit einem Medium aus »Tank 1«, das gefiltert wiederverwendet wird.
2. Roboterstation mit zwei Robotern: Der erste bearbeitet eine Seite, der zweite die Gegenseite. Beide arbeiten mit Flüssigkeit aus »Tank 2«, ebenfalls gefiltert.
3. Abschließendes Spülen mit Wasser aus »Tank 3«.
4. Trocknung: zunächst Heißluft mit Drehen und Schwenken der Warenträger, anschließend Vakuumtrocknung.
Die Beschickung erfolgt manuell, der Transport über ein rollierendes Bandsystem.
Werkzeuge im Einsatz
In der aktuellen Konfiguration arbeitet Roboter A mit einem fixierten Werkzeug, Roboter B wechselt pro Takt zwischen zwei Werkzeugen:
• Werkzeug 1 kombiniert Flachstrahl- und Vollstrahldüse mit 100 l/min bei 100 bar, geeignet für Flächen, Bohrungen und Hinterschneidungen.
• Werkzeug 2 nutzt fünf Flachstrahldüsen für große Flächen und Hohlräume, ebenfalls bei 100 bar.
Nicht eingesetzte Werkzeuge lagern geschützt in trockenen Bereichen; auf Wunsch können spezielle Ablagestationen ergänzt werden.
Stäubli-Werkzeugwechsler als Schlüsselkomponente
Eine Herausforderung war der sichere Einsatz eines Werkzeugwechslers in der Nasszelle. Stäubli entwickelte dafür eine Lösung mit angepassten Werkstoffen und Beschichtungen. Der Wasserübergang ist dauerhaft dicht, sodass die Medienführung zuverlässig funktioniert. Da Silberhorn im Nassbereich keine Elektronik verwendet, wird die Werkzeugerkennung pneumatisch gelöst: Ein Modul meldet über Druckunterschiede, ob und welches Werkzeug am Wechsler angedockt ist.
Nutzen für den Anwender
Die Lösung bietet:
• flexible Reinigung verschiedenster Geometrien und Materialien,
• kompakte Bauweise trotz Robotertechnik,
• geringere Kosten und Rüstzeiten durch entfallende Greiferwechsel,
• stabile Sauberkeit durch abgestimmte Medienführung und zweistufige Trocknung.
Kundenstimme
Jürgen Bindl, Betriebsleiter der ZBG Zerspanungstechnik Bruck GmbH, betont: »Die unterschiedlichen Reinigungsaufgaben, die sich bei verschiedenen Geometrien oder Oberflächen ergeben, können wir dank Robotik in Kombination mit einer Auswahl an Werkzeugen problemlos bewältigen. Auch schwer zugängliche Geometrien werden mühelos erreicht.«